- ›
- Produkter ›
- Motorer ›
- Servomotor ›
- FASTECH – Ezi-SERVO › Ezi-SERVO II EtherCAT ALL
Ezi-SERVO II EtherCAT ALL
EtherCAT-baserad stegmotorsystem
Ezi-Servo II EtherCAT ALL är ett stegmotorsystem med EtherCAT, high speed Ethernet-baserad fältbuss (100 Mbps Full Duplex). Ezi-Servo II EtherCAT ALL är EtherCAT-slavmodul som stödjer CAN-applikationslager över EtherCAT (CoE). Ezi-Servo II EtherCAT ALL är implementerad med CiA 402 Drive Profile. Stöd för profilpositionsläge, hemmaläge, cykliskt synkron positionering.
- Motor + Encoder + Drive + Controller Integrerat
- CiA 402 Drive Profile Support
- Closed Loop Stepping System
- Ingen justering av förstärkning
- Vibrationsfri vid stillestånd
- Värmereduktion / Momentförbättring
- Hög upplösning / Snabbt momentsvar

Fri från bekymmersam trimning av förstärkning
För att säkerställa maskinens prestanda, jämnhet, positionsfel och lågt servoljud kräver konventionella servosystem justering av servovinsten som ett första avgörande steg. Även system som använder automatisk inställning kräver manuell inställning efter att systemet har installerats, framförallt om mer än en axel är beroende av varandra.
Ezi-Servo II utnyttjar de bästa egenskaperna hos steg, closed loop motion kontroll och algoritmer för sluten slinga för att eliminera behovet av tråkig förstärkning som krävs för konventionella servosystem med closed loop. Detta innebär att Ezi-Servo II är optimerad för applikationen och redo att fungera direkt ur lådan. Ezi-Servo II-systemet utnyttjar de unika egenskaperna för closed loop styrning, vilket eliminerar dessa besvärliga steg och ger ingenjören ett servosystem med hög prestanda utan att slösa bort installationstiden.
Ezi-Servo II är speciellt lämpad för låg styvhetsbelastning (till exempel ett rem- och remskivsystem) som ibland kräver konventionella servosystem som medför den extra dyra och skrymmande växellådan. Ezi-Servo II presterar även exceptionellt vid tunga belastningar och höga hastigheter.
Värmereducering och energibesparing
Ezi-Servo II minskar motorns ström när motorns belastning är låg och ökar motorns ström när belastningen är hög. Genom att optimera motorströmmen kan motorns värme reduceras och energi kan sparas.
Momentförbättring
Ezi-Servo II kan öka motorströmmen upp till 150% genom att ställa in Run Current via parameter. Därför kan accelerations- och retardationsegenskaper och vridmomentegenskaper vid låg hastighet ökas. Ezi-Servo II kan förbättra vridmomentet i låghastighetsområdet med uppemot 30%.
Jämn och noggrann rörelse
Ezi-Servo II är ett avancerat servosystem med en högupplösande encoder (upp till 20 000 pulser per varv). Till skillnad från en vanlig Microstep-enhet, utför den inbyggda högpresterande MCU (Micro Controller Unit) vektorkontroll och filtrering, vilket ger en jämn rotationsstyrning med minimalt momenttrippel.
Exakt stopp under insvängning
På samma sätt som konventionella stegmotorer, synkroniserar Ezi-Servo II direkt med kommandopulser som ger snabb positionssvar. Ezi-Servo II är det bästa valet när nollfartsstabilitet och snabba rörelser inom kort avstånd krävs. Traditionella servomotorsystem har en naturlig fördröjning som kallas setting time mellan kommandosignalerna och den resulterande rörelsen på grund av den konstanta övervakningen av nuvarande position.
Closed Loop System
Ezi-Servo II är ett innovativt Closed Lopp System som använder en högupplöst motormonterad givare för att övervaka den aktuella positionen. Omkodarens återkoppling gör det möjligt för Ezi-Servo II att uppdatera den aktuella positionen var 25:e mikrosekund. Det gör det möjligt för Ezi-Servo II-enheten att kompensera för förlust av position, vilket säkerställer korrekt positionering. Exempelvis till följd av av en plötslig lastförändring, kan en konventionell stegmotor och enhet förlora ett steg, men Ezi-Servo II korrigerar automatiskt positionen med encoderåterkoppling.
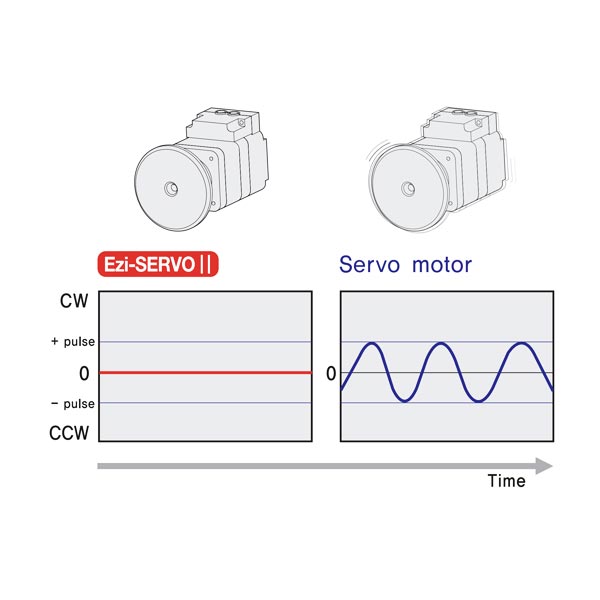
Absolut stilla i position
Konventionella AC servomotorer kör ofta förbi målpositionen och korrigerar med några snabba oscillerande rörelser i motsatt riktning. Detta fenomen blir tydligast i system med hög vilofriktion eller där den statiska friktionen i rörelse är hög i förhållande till den dynamiska. Lösningen är att minska förstärkningen, vilket ger en långsam och icke-noggrann positionering, eller att använda Ezi-Sservo II Motion Control System. Eftersom Ezi-Servo II kombinerar stegmotorns höga prestanda kring målpositionen med konventionella AC servomotorns återkoppling, uppstår ingen oscillation kring målpositionen. Detta är speciellt värdefullt för rörelser som behöver högsta möjliga precision, t ex applikationer inom nano-teknologi, halvledartillverkning, visionsystem, rapid prototyping eller ink-jet.
Jämn och noggrann rörelse
Ezi-Servo II är en servodrivenhet med hög precision och använder en högupplöst kodare med 10 000 pulser/varv. Till skillnad från en konventionell Microstep-enhet utför den högpresterande MCU-enheten (Micro Controller Unit) vektorkontroll och filtrering, vilket ger en smidig rotationskontroll med minimala ripplar.
Hög upplösning
Enheten i positionskommandot kan delas exakt. (Max 10.000 pulser/revolution).Säker positionering vid höga varvtal
Ezi-Servo II positionerar säkert även vid höga varvtal. Tack vare encoder-återkopplingen kan man använda ett stort varvtalsområde utan att riskera positionsfel.