- ›
- Teknik ›
- Handbok Drivsystem › Egenskaper elmotorer
Egenskaper elmotorer
Nätmatad motor
Traditionell elektromaskinlära utgår från att man matar växelströmsmotorer med sinusformad växelspänning och att den till statorn inmatade elektrisk effekten:
P = √3*U*I*cosϕ
är konstant i varje ögonblick (förutsatt att uttagen effekt är konstant). Statorflödets vektornhastighet (synkrona varvtalet) hos den nätmatade motorn är också konstant. Synkrona varvalet ns:
ns = (2/p)*f*60
f = Nätfrekvens [Hz]
p = Poltal
Exempel: En 4-polig motor som matas med 50 Hz har synkront varvtal = 1500 varv/min.

Har du frågor kring våra produkter?
info@sigbi.se
Frekvensomriktarmatad elmotor
Teoretiskt är det ingen skillnad mellan reglering av standard elmotorer med frekvensomriktare eller reglering av servomotorer med servoregulatorer.
Hastighetsreglering förutsätter att man kan kontrollera hastigheten hos staterflödet. I moderna omriktare har man 6 st kraftswitchar som kan ge flödesvektorn definierade rörelsetillskott i 6 riktningar (3-fasmotor med 3 st 120° åtskilda lindningar som vardera kan matas med positiv eller negativ spänning).
Flödesvektorn:
Φ = ΣUC*Δt
UC = Omriktarens mellanledsspänning [V]
Δt = Spänningspulsens längd
Man inser lätt att hastighet och motorspänning endast kan regleras genom hur man distribuerar pulser med olika längd i motor i de tre motorlindningarna.
Inmatad elektrisk effekt:
Den traditionella effektformeln enligt ovan gäller inte för omriktardrift dar motorn matas med korta spänningspulser. För den effekt som i varje ögonblick matas in till en motorfas gäller generellt:
p = u*i
Mellan matningsfaserna är spänningen konstant = Uc under själva pulsen och = 0 under pausen.
Se våra högpresterande frekvensomriktare.
Motormoment
Allmänt gäller för momomentberäkning:
M =P = P*60
ω 2*π∗n
ω = vinkelhastighet [rad/sek]
Under en enstakt puls:
M = UC*i*60
2*π∗n Mellan pulserna är M = 0
Axeln hos en motor utan tröghetsmoment skulle rycka fram i små steg (ungefär som en stegmotor). Tröghetsmomentet gör emellertid att man får jämn hastighet.
Ljudnivå
De högfrekventa momentpulsationerna medför tangentiella ljudalstrande krafter i motorn. Ju fler pulser (högre switchfrekvens) ju mindre blir de ljudalstrande krafterna och ju lägre ljudnivå får man. Felaktig distribution av pulserna gör att man kan få momentrippel som ligger på 6 x motorfrekvensen. (150Hz vid motorfrekvensen 25Hz). Detta momentrippel förorsakar vibrationer som ofta gör att man får resonansljud som lätt fortplantar sig genom t ex fläktkanaler eller i byggnadsstomme.
Bra eller dåliga frekvensomriktare?
Värmeförluster, lagerlivsängd, ljudnivå och prestanda är i hög grad beroende av frekvensomriktarens modulation (den pulsbreddsmodulerade spänningen till motorn).
Modulation
Frekvensomriktarens modulation är i hög grad avgörande för motoregenskaperna i kvalificerade drifter med krav på dynamik och precision. Motortemperaturen påverkar driftssäkerheten och vibrationer förorsakar kortare lagerlivlängd. Utan tillräckliga kunskaper i elmaskinteori är det lätt att dra slutsatsen att man i omriktaren skall efterlikna nätspänningen (syntetiserad sinus). Av ovanstående framgår det emellertid klart att detta är felaktigt och leder till axelmoment som i figuren nedan.
Transientströmmar
Riktigt konstruerad modulation tar även hänsyn till övergångsförlopp. Vid snabba hastighetsändringar och korta cykeltider är det viktigt att ändring i motorns magnetisering sker utan att ge upphov till transientströmmar. Transientströmmen är en bromsande likström som gör att rotorn bromsas och således inte följer frekvensökningen. Nackdelarna är följande:
- Starten fördröjs 20 – 100 ms (längre tid ju större motor man har)
- Dåligt accelerationsmoment
- Extra förluster och förhöjd motortemperatur vid hög startfrekvens
Enkel kvalitetskontroll
Så här kan man enkelt kontrollera frekvensomriktarens kvalitet:
Kör elmotorn vid frekvensen 1 Hz.
Med en bra frekvensomriktare roterar motoraxeln med konstant hastighet. (2 varv/sek med 2-polig motor). Frekvensomriktare med dålig modulationskvalitet ger momentpulsationer (se figuren ovan) som Du ser som ojämn eller ryckig gång (märks tydligt om man bromsar med handen). Momentpulsationerna finns inom hela varvtalsområdet men är svåra att se vid högre frekvenser. Pulsationsfrekvensen är 6 x utfrekvensen (0 – 300 Hz med motorfrekvens 0 – 50Hz) och förorsakar ofta mekaniska vibrationer och resonansfenomen.
Elmotorns förluster
Frekvensomriktarens modulation påverkar i hög grad motorns momentegenskaper och värmeförluster. Felaktig modulation medför:
- Att motorn överhettas vid lågt varv
- Lägre utnyttjning av motorn vid märkvarvtal
- Vibrationer (eventuellt kombinerat med induktionsströmmar genom lager) gör att man kan få kortare lagerlivslängd)
Fältförsvagning i elmotorer
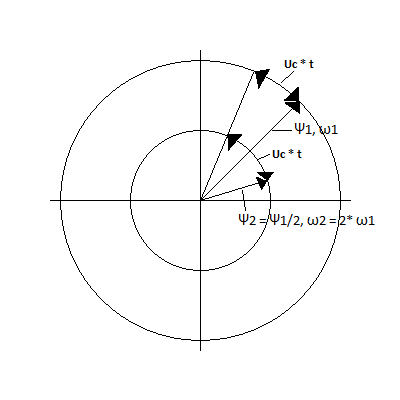
Den vanliga Y-kopplade asynkronmotorn är lindad för att matas med 3×380 V (220 V fasspänning) vid 50 Hz. Statorflödet i den 2-poliga maskinen roterar då ett varv på 1/50 s = 20 ms. Flödesvektorn (som ger det uttagbara axelmomentet) har den längd som är bestämd av maskinkonstruktion och matningsspänning. Flödesvektorns periferihastighet är alltid konstant och i varje ögonblick proportionell mot matningsspänningen.
När motorn matas från en frekvensomriktare är den konstanta flödeshastigheten proportionell mot mellanledsspänningen Uc. För att ändra varvtalet (statorflödets vinkelhastighet ω) med konstant flöde, måste man kontrollera den tid det tar att rotera ett varv. Detta kan bara göras på ett sätt: Statorflödet får under korta intervall förflytta sig med sin konstanta hastighet och däremellan får den stå stilla (göra paus genom att spänningen till motorn är = 0 under en viss tid). Statorflödet (som bestämmer motoregenskaperna) kan alltså kontrolleras med modulation av paustiden. Detta kallas vanligen PWM eller Vector Pause Modulation (VPM).
Spetsen på flödesvektorn Y1 rör sig en viss sträcka Uc*t (yttre cirkeln i nedanstående figuren) vid frekvensen 50 Hz. Vid 100 Hz rör sig vektorspetsen med samma förflyttning per tidsenhet (inre cirkeln) och med dubbla vinkelhastigheten.
Resultat:
Vid 100 Hz har flödet och därmed uttagbart moment minskat till hälften.
Effekten P = ω1*M1 = 2ω1*M1/2 = konstant
Läs mer om asynkronmotor.
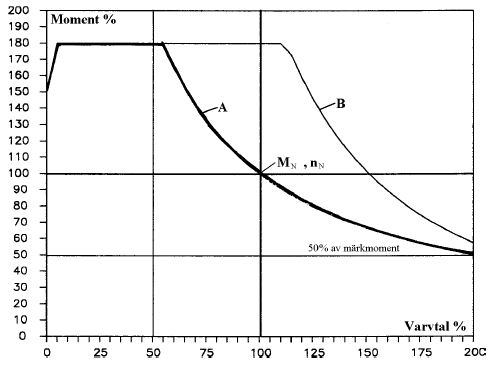
Moment och varvtal
A: Maximalt axelmoment med konstant cosϕ och självreglering (konstant varvtal med RI- och eftersläpningskompensering, låga motorförluster och lågt momentrippel) upp till märkfrekvens och märkmoment.
B: Maximalt uttagbart moment. Större eftersläpning kommer att öka rotorförlusterna.
Båda kurvorna visar hur momentet minskar när motorspänningen inte längre ger tillräcklig magnetisering i motorn.
Eftersläpning
En inducerad spänning som ger upphov till rotorström är förutsättningen för att en asynkronmotor skall avge moment. Rotorstömmen är en funktion av rotorfrekvensen och motorns magnetisering. Vid ökande belastning sjunker motorns varvtal medan statorflödet fortfarande roterar med samma hastighet. Rotorn släpar efter och rotorfrekvensen ökar och därmed ökar även rotorstömmen, nödvändigt för att rotorn skall kunna tillgodose det ökade momentbehovet.
Nätmatad elmotor
Definition av eftersläpningen s:
s = ((ns – n)/ns)* 100 [%]
ns = synkront varvtal
n = motoraxelns varvtal
Exempel: s = ((1500 – 1440) / 1500) * 100 = 4%
Omriktarmatad motor
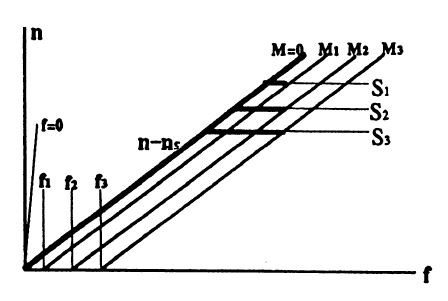
Eftersläpningen, enligt den traditionella definitionen, är inte ett mått på belastningen då motorn matas med variabel frekvens. Vi får därför införa följande nya definition:
S = ns – n [varv/min]
För motorn i ovanstående exempel får man: S = 1500 – 1400 = 60 RPM
Om denna motor matas med 20 Hz (ns = 600 RPM), kommer driftvarvtalet vid oförändrat moment att vara:
n = 600 – 60 = 540 RPM
Det är självklart så att tillämpningen av traditionell eftersläpningsberäkning (som i exemplet skulle ge s = 10%) inte är relevant för belastningsrad eller för traditionell rotorförlustberäkning.
Servomotorer
Asynkrona servomotorer skiljer sig inte från standardmotorer när det gäller behovet av rotorfrekvens för att kunna avge moment. Återkoppling av rotorläget och fältvektororientering ger automatisk den rotorfrekvens som axelmomentet kräver.