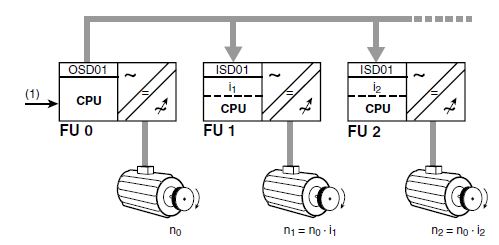
Funktion: Körning av flera motorer med samma varvtal genom inställning av kopplingsfaktorn i Master-Slave-drift
Verkan: Bestämning av översättningsförhållandet för börvärdekopplingen. En frekvensomriktare ställs in som master. Denna ger signal vidare för snabb börvärdekoppling till upp till 6 andra frekvensomriktare som ställs in som slavar.
Ritning över master/slav-koppling mellan frekvensomriktare och elmotorer.
Maximalt 6 omriktare kan kopplas samman till en CDA3000. I händelse av fel hos masterns referensingång kommer eller om referenssignalens kontrollsumma är felaktig, kommer masteromriktaren att svara efter den tid som ställts in med parameter 838-MSECT med att stoppa slavomriktaren.
När tidperioden från 838-MSECT starar kan man få ett varningsmeddelande. För detta måste den relevanta funktionsväljaren för den digitala utgången ställas in för varningsmeddelande WFDIG.
Drivningarna kör inte vinkelsynkront men hastighetssynkront med hänsyn till kopplingsfaktorn.
Snabb referenskoppling är begränsad av utgång OSD01 och ingång ISD01.
Den digitala utgången OSD01 har ingen funktion vid körsättet slavomriktare.
Kopplingsfaktorn i numeriskt format. Detta innebär att decimaler representerar 65536 delning.
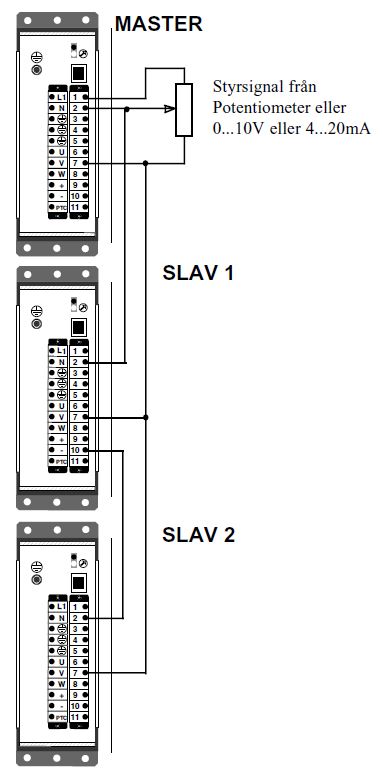
Enkel Master/Slav med SmartDrive omriktare
Styr- och manöverfunktionerna är galvaniskt åtskilda. Detta gör att styrningarna kan sammankopplas i gemensamma styrsystem.
Varvtalsreglering
MASTER: Varvtalet kan ställas in med potentiometer, styrström (t.ex. 4 – 20mA) eller styrspänning. På den analogutgången (SOUTA) får man en spänning 0…10V som är direkt proportionell mot den på styrningen inställda maxfrekvensen (eventuellt skalad med den faktor som väljs med parameter 69-KOUTA).
SLAV 1: Utsignalen från masterns analogutgång kopplas till styringången. Utfrekvensen från SLAV 1 kommer då att vara direkt proportionell mot masterns utsignal.
SLAV 2: Denna kopplas in på motsvarande sätt som SLAV 1 men med Utsignalen från slav 1 som börvärde.
SLAV 3 etc: Kaskadkopplas på motsvarande sätt.
Acceleration – Drift – Deceleration
Om automatisk lastreglering och eftersläpningskompensering är aktiverade kommer motorerna att följa varandra med ±0,5% noggrannhet – oberoende av individuella motorers lastvariationer.
Styrningarna kan manövreras var för sig eller gemensamt. Med parallellkopplade manöverplintar för respektive Fram, Back och Back samt digitala ingångar, kommer alla manöverfunktioner att bli gemensamma.
Från mastern leds en börvärdessignal vidare ut till de anslutna "slavarna" som följer mastern och som genast svarar på om mastern börjar gå långsammare eller tyngre.