Servomotor
Servomotor – för rörelse och dynamik med exakt positionering
Vi arbetar med servomotorer från ledande europeiska tillverkare och kan erbjuda både konventionella synkrona servomotorer och återkopplade stegmotorer. Vi tar fram en komplett lösning för hela servosystemet, som är perfekt anpassad till din applikation.
Servomotorer ger maskinbyggare en dynamik och positionsnoggrannhet som man inte kan uppnå med andra motortyper

Kontakta Stefan Svelenius för mer information.
stefan.svelenius@sigbi.se
Växel: 042-654 00
Servomotor
– för rörelse och dynamik med exakt positionering
Vi arbetar med servomotorer från ledande europeiska tillverkare och kan erbjuda både konventionella synkrona servomotorer och återkopplade stegmotorer. Vi tar fram en komplett lösning för hela servosystemet, som är perfekt anpassad till din applikation.
Servomotorer ger maskinbyggare en dynamik och positionsnoggrannhet som man inte kan uppnå med andra motortyper
Kontakta Stefan Svelenius för mer information.
stefan.svelenius@sigbi.se
Växel: 042-654 00
Synkrona servomotorer och återkopplade stegmotorer
Synkronservomotorer med
integrerat PLC
Stegmotorer med återkopplingersätter pneumatik
Synkronmotorer, servomotorer och servoförstärkare
Återkopplade synkronmotorer, servomotorer, har en rotor bestående av permanentmagneter. Statorn Motorn är långsmal för att tröghetsmomentet ska vara så lågt som möjligt. Servomotorn återkopplar sin position tillbaka till en servoförstärkare. Internt i servoförstärkaren finns reglerloopen vars uppgift är att hela tiden minimera positionsfelet. Servoförstärkaren kommunicerar samtidigt mot ett PLC som, i hård realtid, uppdaterar med nya börvärden så att man följer sin fördefinierad körprofil så optimalt som möjligt.
Positionering med en återkopplad synkronmotor
En servomotor kan köras med olika kommandon. Ett exempel är med en förutbestämd hastighet och en acceleration för att nå sin hastighet. För att avbryta skickar man ett stoppanrop. Positionering är många gånger önskvärt och används när man har fysiska begränsningar ex. mekaniska ändlägen eller ska interpolera rörelser, robotrörelser. Här kan man välja mellan absolut förflyttning eller en förflyttning relativt sin aktuella position.
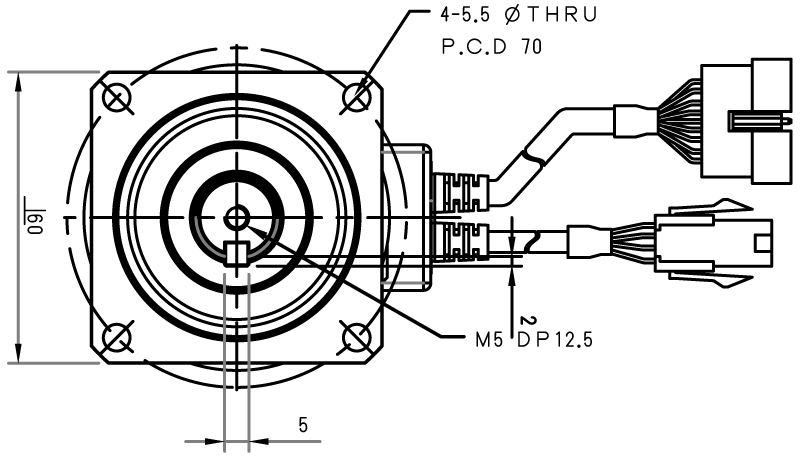
Motorns kablage
Kablaget mellan en servomotor och servoförstärkaren består normalt av två kablar. En matningskabel för spänning och en kabel för återkopplingen av aktuell position. Dessa kablar har oftast en maximal längd på 25 meter. Det innebär att en servomotor oftast inte kan placeras längre bort från styrskåpet än så. Ett alternativ är att ha en decentralt designad hårdvarulösning med ett styrskåp närmare servomotorns placering och där servoförstärkaren kommunicerar via en fältbuss tillbaka till det primära styrskåpet med PLC:t där körprofilen beräknas.
Här finns det ett annat alternativ, en motor med integrerad kraftelektronik. Här sparar man in på det ofta så dyra kablaget och man sparar in plats i styrskåpet. Våra servomotorer med integrerad kraftelektronik kan bestyckas med integrerat PLC och med fältbuss. Det är fritt att välja någon av de gängse Ethernet-baserade fältbussarna. Våra leverantörer har stöd för kommunikation i hård realtid.
Motorbroms
För hängande last är det viktigt med en motorbroms. När man stänger av motorn skulle annars motorn börja snurra bakåt, neråt, vilket kan få förödande konsekvenser för maskin och anläggning och i värsta fall orsaka fara för människor och liv. Viktigt vid dimensionering av en servomotor med hållbroms är att hållbromsens moment klarar av den aktuella lasten.
Säkerhet
En maskin och anläggnings produktion som måste stanna är inte effektiv. Samtidigt kan operatören ibland behöva ta sig nära maskiners och anläggningars rörliga delar för eventuell service och liknande. Här finns det ett flertal alternativ för att upprätthålla produktion och samtidigt garantera operatörens säkerhet. Med hjälp av säkerhets-PLC och säkra I/O-moduler kan man övervaka sina motorer. Man kan övervaka hastigheten. Man kan övervaka riktningen motorn roterar. Man kan självklart övervaka motorns moment och sätta en övre tillåten gräns. Denna momentgräns kan vara vald på så sätt att den inte skadar den operatör som kommer nära. Dessa funktioner är en extra kostnad men är en billig investering jämfört med farorna.
Servomotorer och linjärenheter – robotapplikationer
En motor kan positionera åt två håll. Om denna motor byggs samman med en linjärenhet så har vi fått en translatorisk rörelse istället för tidigare rotatorisk. Om vi på linjärenhetens släde monterar ytterligare ett paket med servomotor och linjärenhet så har vi fått det vi kallar ett XY-bord. Här finns många intressanta användningsområden. Anta att vi monterar ytterligare ett paket med servomotor och linjärenhet i vertikal position och då kan vi positionera ”i rummet”. Portalrobotar är uppbyggda på detta sätt. Portalrobotar påträffas bland annat i applikationer kring formsprutor, stapling av lådor på pall och liknande.
Robotar
Bygger ni robotar så kan vi erbjuda en komplett automationslösning. Vi jobbar tillsammans med österrikiska SIGMATEK. SIGMATEK utvecklar och tillverkar kompletta automationslösningar och har stor erfarenhet inom robotar. Vi erbjuder kinematiken för portalrobotar, deltarobotar, gantryrobotar, industriella- 6-axliga robotar, scara-robotar m.fl. Tack vare den öppna arkitekturen och objektorienterade utvecklingsmiljön så kan man med ett par enkla grepp implementera sine egna kinematik. Läs mer här: Robotapplikationer
Växlar
Servomotorer har, till skillnad från en stegmotor, ett konstant moment över sitt varvtalsområde. Stegmotorns moment faller ganska raskt vid högre varvtal. Servomotorn å sin sida har ett mycket högre varvtalsområde. Typiskt varvtal är 3000 rpm men 8000 rpm är inte ovanligt. För att få ett högre moment så kan man välja en växel. Växeln sänker varvtalet men höjer momentet, linjärt. En växel 2:1 halverar varvtalet men dubblerar momentet. Växlar finns med olika utväxling och upp till 500 är möjligt.
Dimensionering
Vid dimensionering av en växel är det viktigt att växeln klarar av accelerationsmomentet. Om man har en applikation med för hög acceleration så kan man vara tvungen att gå upp en storlek till en växel som är designad för det. En växels noggrannhet mäter man i bågminuter. Tillverkare av växlar anpassar motorsidan mot den tilltänkta motorns flänsstorlek.
Välj återkoppling efter ert behov
Våra servomotorer kan fås med en mängd olika givare. Välj mellan resolver, inkrementell givare eller absolutvärdesgivare.
- Resolver
- EnDat
- Hiperface
- SinCos
Rådgivning och support
Att köpa produkter för komplexa system är en ansvarsfylld och ibland komplicerad uppgift. Med mer än 30 års erfarenhet av automatisering och drivsystem hjälper vi dig med att göra rätt produktval och att hitta rätt lösning.