- ›
- Produkter ›
- Motorer ›
- Servomotor ›
- FASTECH – Ezi-SERVO › Ezi-SERVO II Plus-E ALL
Ezi-SERVO II Plus-E ALL
Nätverksbaserad Motion Control – Ethernet
Ezi-Servo II är ett innovativt återkopplat stegmotorbaserat drivsystem som använder en högupplöst encoder för att övervaka den aktuella positionen. 254 axlar kan manövreras från en PC via Ethernet-kommunikation och daisy-chain-anslutning är tillgänglig via internt utrustad Ethernet HUB. Alla rörelsevillkor ställs in via nätverket och sparas i Flash ROM som en parameter.
- Inbyggd controller
- Ethernet Interface
- Positionstabell
- Closed Loop System
- Ingen justering av förstärkning
- High Resolution/Fast Response
- Värmereduktion/Momentförbättring


Kontakta Stefan Svelenius för mer information.
stefan.svelenius@sigbi.se
Telefon: 042-654 00
Driver och Motor
Driver modell | Ezi-SERVOII-PE-ALL-42 | Ezi-SERVOII-PE-ALL-56 | Ezi-SERVOII-PE-ALL-60 | Ezi-SERVOII-PE-ALL-86 | |||
|---|---|---|---|---|---|---|---|
Matningsspänning | 24 VDC +-10% | 40-70 VDC | |||||
Strömförbrukning | Max 500 mA, ex motorström | ||||||
Omgivningstemperatur | Drift: 0~50˚C, Lager: -20~70˚C | ||||||
Vartalsområde: | 0~3000 rpm. Up to the resolution of 10,000[ppr], maximum speed can be reached by 3,000[rpm] and with the resolution more than 10,000[ppr], maximum speed shall be reduced accordingly. | ||||||
Upplösning (pulser/varv) | 10 000, 20 000 | ||||||
Skydd | Over Current Error, Over Speed Error, Position Tracking Error, Over Load Error, Over Temperature Error, Over Regenerated Voltage Error, Motor Connect Error, Encoder Connect Error, In-Position Error, ROM Error, Position Overflow Error | ||||||
Ingångar | 3 dedicated inputs (LIMIT+, LIMIT-, ORIGIN), 9 programmable inputs (Photocoupler) | ||||||
Utgångar | 1 dedicated output (Compare Out), 9 programmable outputs (Photocoupler), Brake | ||||||
Kommunikationsgränssnitt | Ethernet communication, Dual port Ethernet switch embeded,
Communication speed: 10/100 Base – T/TX Full Duplex | ||||||
Positionsreglering | Incremental mode / Absolute mode Data Range: -134,217,728 to +134,217,727 [pulse], Operating speed: Max. 3,000 [rpm] | ||||||
Referenskörning | Origin Sensor, Z phase, ±Limit sensor, Torque | ||||||
GUI | User Interface Program within Windows | ||||||
Mjukvara | Motion Library (DLL) for windows 7/8/10 | ||||||
Specifikation motor
Modell | Ezi-SERVOⅡ-PE-ALL-42 M/L/XL | Ezi-SERVOⅡ-PE-ALL-56 S/M/L | Ezi-SERVOⅡ-PE-ALL-60 S/M/L | Ezi-SERVOⅡ-PE-ALL-86 M/L/XL |
|---|---|---|---|---|
Antal faser | 2 | 2 | 2 | 2 |
Ström/fas | 1.2 | 3.0 | 4.0 | 6.0 |
Hållmoment (Nm) | 0.44/0.5/0.65 | 0.64/1.0/1.5 | 0.88/1.28/2.4 | 4.5/8.5/12 |
Tröghetsmoment(gcm2) | 54/77/114 | 180/280/520 | 240/490/690 | 1800/3600/5400 |
Vikt (g) | 440/520/660 | 760/920/130 | 840/980/1540 | 2682/4226/5756 |
Längd (mm) | 40/48/60 | 46/55/80 | 47/56/85 | 78/117/155 |
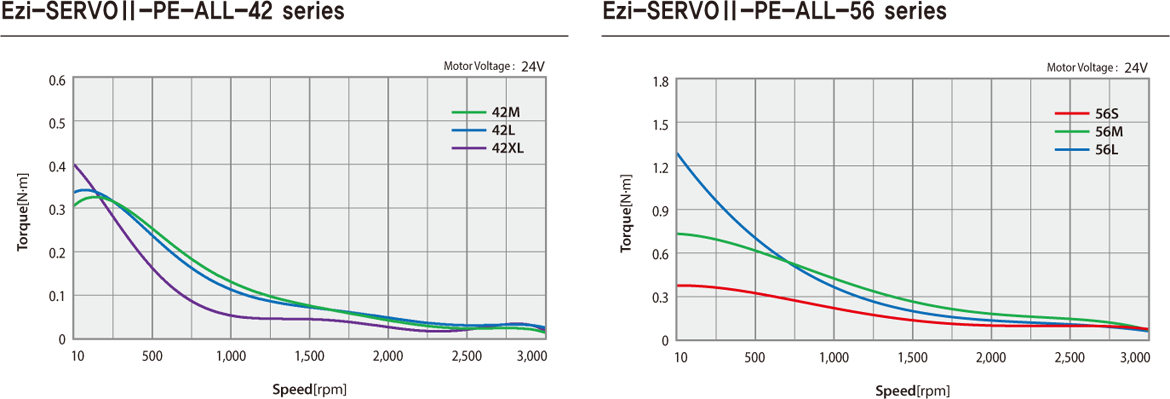
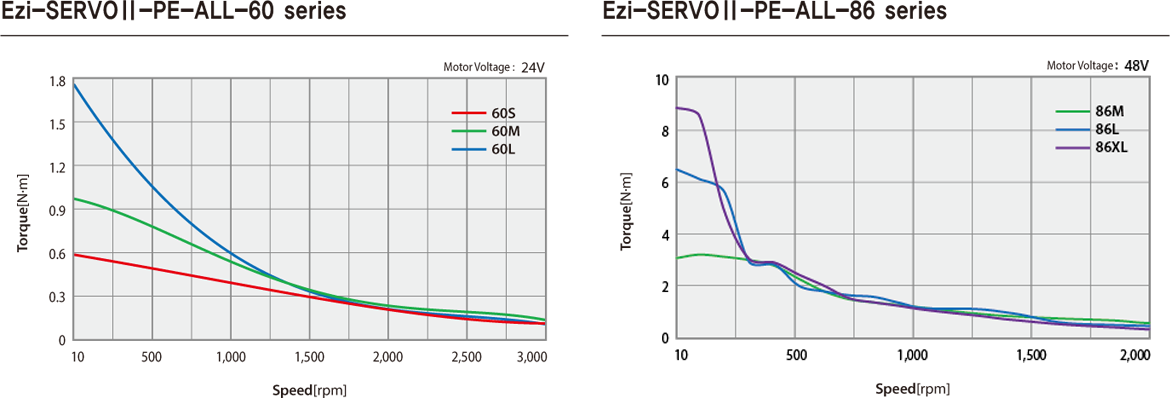
Momentkurva
Hög upplösning
Enheten i positionskommandot kan delas exakt. (Max 20.000 pulser per motorvarv)Stort användbart varvtalsområde
Jämfört med vanliga stegmotorer och drivenheter kan Ezi-Servo II upprätthålla ett högt vridmoment under en relativt lång tidsperiod.Säker positionering vid höga varvtal
Ezi-Servo II positionerar säkert även vid höga varvtal. Tack vare encoder-återkopplingen kan man använda ett stort varvtalsområde utan att riskera positionsfel.Video
Ezi-SERVO II Plus-E ALL
Fri från bekymmersam trimning av förstärkning
De flesta konventionella servosystem kräver noggrann justering av förstärkningsparametrar för att man ska uppnå tillfredsställande prestanda vad gäller mjukhet, positionsnoggrannhet och låg ljudnivå. Även system med olika grad av auto-tuning behöver ofta en hel del handpåläggning för att fungera bra, särskilt i fleraxliga applikationer.
Ezi-Servo II använder de bästa egenskaperna hos stegmotorn och ett återkopplat servosystem för att eliminera behovet av det tidsödande arbetet med att justera systemets förstärkning. Detta innebär att Ezi-Servo II är optimerad för applikationen och redo att tas i drift direkt vid leverans. Ezi-Servo II är särskilt väl lämpad för drivsystem med låg styvhet, till exempel linjärenheter med kuggremsdrift.
Tack vare att Ezi-Servo II, till skillnad från konventionella AC servosystem, inte har en reglerande utan en effektivare korrigerande positionsåterkoppling, behövs ingen noggrann matchning av lastens tröghetsmoment. Man klarar sig därför oftast utan en planetväxel, en komponent som tar plats och väsentligt ökar kostnaden när man använder konventionella AC servon. Även med tunga laster och höga hastigheter presterar Ezi-Servo II exceptionellt.
Värmereducering och energibesparing
Ezi-Servo II minskar motorns ström när motorns belastning är låg och ökar motorns ström när belastningen är hög. Genom att optimera motorströmmen kan motorns värme reduceras och energi kan sparas.
Momentförbättring
Ezi-Servo II ökar spänningen till motorn med den interna DC-DC-omvandlaren. Momentet vid hög hastighet ökar. Dessutom är det möjligt att ställa in Run Current upp till 150%, vilket medför att vridmomentet vid låg hastighet ökar. Vridmomentet kan även förbättras med cirka 30% över hela hastighetsområdet.
Jämn och noggrann rörelse
Ezi-Servo II är en servodrivenhet med hög precision och använder en högupplöst kodare med 10 000 pulser/varv. Till skillnad från en konventionell Microstep-enhet utför den högpresterande MCU-enheten (Micro Controller Unit) vektorkontroll och filtrering, vilket ger en smidig rotationskontroll med minimala ripplar.
Exakt stopp under insvängning
På samma sätt som konventionella stegmotorer, synkroniserar Ezi-Servo II direkt med kommandopulser som ger snabb positionssvar. Ezi-Servo II är det bästa valet när nollfartsstabilitet och snabba rörelser inom kort avstånd krävs. Traditionella servomotorsystem har en naturlig fördröjning som kallas setting time mellan kommandosignalerna och den resulterande rörelsen på grund av den konstanta övervakningen av nuvarande position.
Closed Loop System
Ezi-Servo II är ett innovativt återkopplat stegmotorbaserat drivsystem som använder en högupplöst encoder för att övervaka den aktuella positionen. Encoderns återkoppling gör det möjligt för Ezi-Servo II att uppdatera den aktuella positionen var 50:e mikrosekund. Det gör det möjligt för Ezi-Servo II-enheten att kompensera för förlust av position, vilket säkerställer korrekt positionering. Exempelvis till följd av av en plötslig lastförändring, kan en konventionell stegmotor och enhet förlora ett steg, men Ezi-Servo II korrigerar automatiskt positionen med encoderåterkoppling.
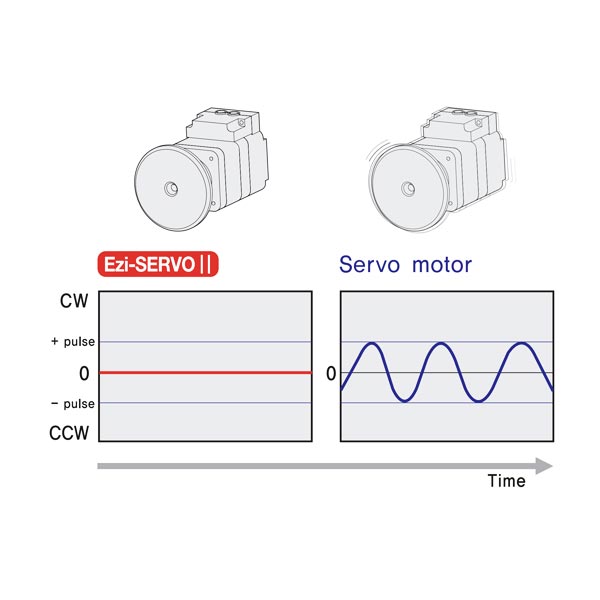
Absolut stilla i position
Konventionella AC servomotorer kör ofta förbi målpositionen och korrigerar med några snabba oscillerande rörelser i motsatt riktning. Detta fenomen blir tydligast i system med hög vilofriktion eller där den statiska friktionen i rörelse är hög i förhållande till den dynamiska.
Lösningen är att minska förstärkningen, vilket ger en långsam och icke-noggrann positionering, eller att använda Ezi-Servo II Motion Control System. Eftersom Ezi-Servo II kombinerar stegmotorns höga prestanda kring målpositionen med konventionella AC servomotorns återkoppling, uppstår ingen oscillation kring målpositionen.
Detta är speciellt värdefullt för rörelser som behöver högsta möjliga precision, t ex applikationer inom nano-teknologi, halvledartillverkning, visionsystem, rapid prototyping eller ink-jet.